
Découverte du robot Mbot
Nous allons avec le robot Mbot comprendre comment cela tout cela marche. Vous pourrez le programmer afin de réaliser un défit qui vous sera communiqué en fin de séquence!
Proposition de projet:
Transformer le Mbot en alarme. Voir vidéos ci-dessous.
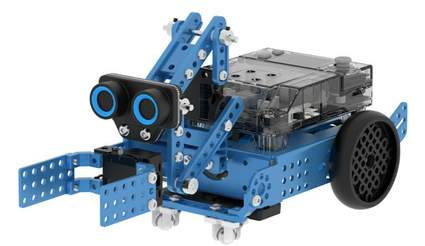
1- Présentation générale du Mbot
2- Présentation de ses constituants

Avant de continuer, compléter le document distribué par votre professeur.
3- Les actionneurs
2- Les capteurs
5- La chaine d'énergie du Mbot
Pour terminer vous aller réaliser la chaine d'énergie du Mbot, demander pour cela le document à compléter à votre professeur.
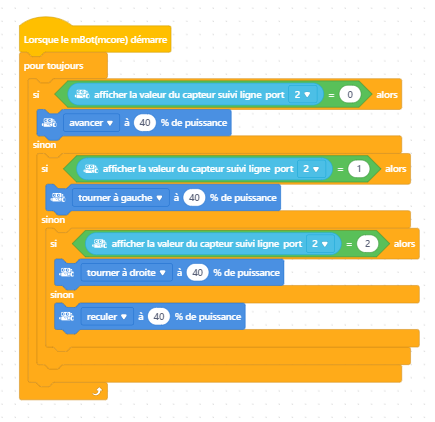
6- Activité suiveur de ligne pur Mbot 1
Pour les plus en avance vous pouvez allez faire l'activité présentée sur la vidéo suivante:
Programme 1

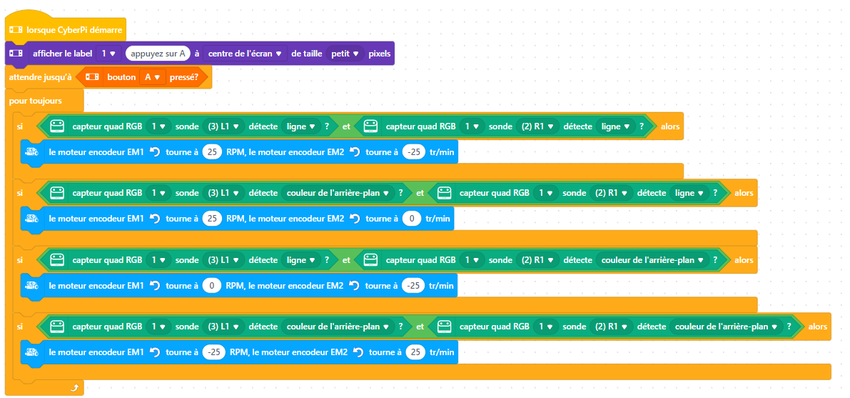
Programme 2
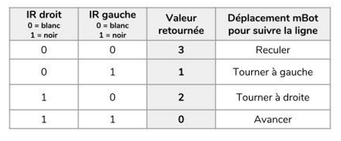
On utilise le capteur de détection des couleurs, en précisant que le trajet à suivre est ici en noir.

Ou suivant la version , l'équivalent suivant:

6- Activité suiveur de ligne pur Mbot 2
Utilisation des servomoteurs sur le mbot 2 avec bras manipulateur
Brancher servomoteur ouverture pince sur port S3
Brancher servomoteur monter descente sur pot S4
En utilisant les fonctions ci-dessous, vous pouvez faire monter et descende le bras, et ouvrir ou fermer la pince
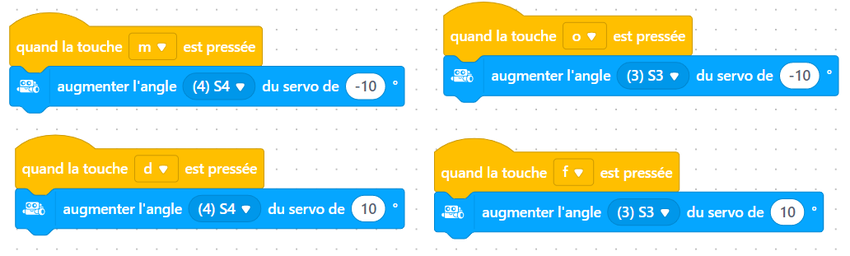
L'angle du servomoteur S4 à inscrite pour avoir le bras en positions haute est de 45° et de 155° pour qu'il soit en position basse.

L'angle du servomoteur S3 à inscrite pour ouvrir complètement la pince est de 15° , et il est de 145° pour la fermer. Voila un programme qui ouvre et ferme la pince.

Utilisation des servomoteurs sur le mbot 2 avec pince gripper

Avant de commencer envoyer la consigne 180° au servomoteur.
pince ouverte 45°
pionce fermée 180°
Activités de révision
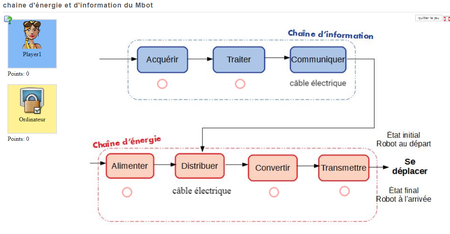
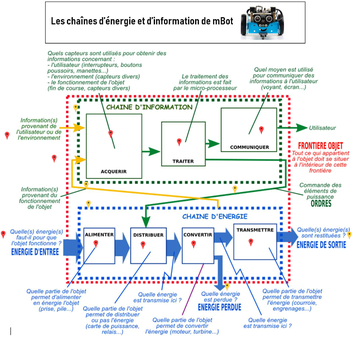
Chaine d'énergie et d'information du Mbot

Découverte et test des capteurs et actionneurs du mbot